Aarnio: Passive Kinesthetic Force Output for Foreground Interactions on an Interactive Chair
Shan-Yuan Teng, Da-Yuan Huang, Chi Wang, Teddy Seyed, Jun Gong, Xing-Dong Yang, Bing-Yu Chen ACM Conference on Human Factors in Computing Systems (CHI), 2019 [PDF] [Video]
Motivation
Activities when seated (e.g., typing or gaming) is common in daily life, and has motivated research on interactive chairs in many application areas, such as work efficiency and ergonomics, driving safety and entertainment. Within this usage context of interactive chairs, haptics as a primary output mechanism have been developed mainly for background interactions, where input to the chair is carried out behind a user’s conscious awareness (or implicit input). Examples for such input include leaning sideway on the chair due to a bad sitting posture. Haptics (e.g., vibrotactile) was used to remind the user to change the posture. However, haptic output for foreground interactions, where input is carried out in the fore of the user’s consciousness (or explicit input), remains unexplored. This class of haptic output is tightly coupled with input and can be a valuable addition to the existing haptic output to improve user experience and enabling new applications on interactive chairs.
In this work, we propose passive kinesthetic force output for user’s explicit input via rotating, tilting, and rolling the chair. This type of output can restrict a user’s motion for novel interactions on a chair. For example, the seat can be hard to rotate or locked in place to restrict user mobility in a first-person VR shooting game, mirroring how severely the player’s vehicle is damaged. Alternatively, the backrest can be hard to recline to convey a message to the user (e.g., hardness indicating the time remaining until the user’s next meeting). This way the user does not need to interrupt the primary task involving both hands, such as eating, to interact with a phone calendar. Since the motion is ambiguous about whether the user is using technology or just recline backward, this type of interactions can be less interruptive to other people in a social event, such as a meeting, where checking the phone repeatedly may be socially inappropriate. This type of haptic output extends and maps to natural force feedback a user already receives when rotating the mechanical joint of a chair (e.g., if a chair does not roll properly, the assumption is that a wheel(s) could be broken), thus, can be natural and easy to understand.
Prototype
Rotation (seat)
We augmented the shaft of the seat with a braking system to restrict its rotational motion. The original gas lift was replaced by a custom-made steel shaft for the sake of simplicity. Applying a brake directly on the shaft did not create enough resistive force. To overcome this challenge, we used a bicycle disc brake instead, which created a longer lever arm to generate braking forces strong enough to lock the seat firmly in place.

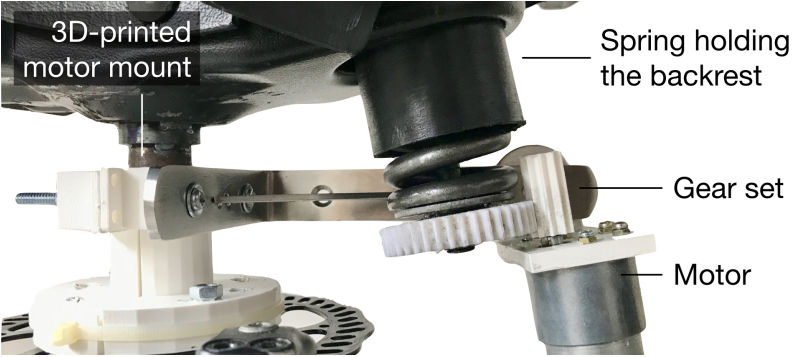
Tilt (backrest)
We created a tilt tension controlling system using a DC motor (ST37A-5A6K2-12-18, Silent Industry) connected to the tension controller via a custom gear set. The gears were used to increase the torque of the motor ( 4.70Nm, 117.5 RPM) to rotate the tension controller. With this setup, we were able to increase the tension from the lowest (spring not compressed) to the highest (spring completely compressed) in about 1.4s, and vice versa.
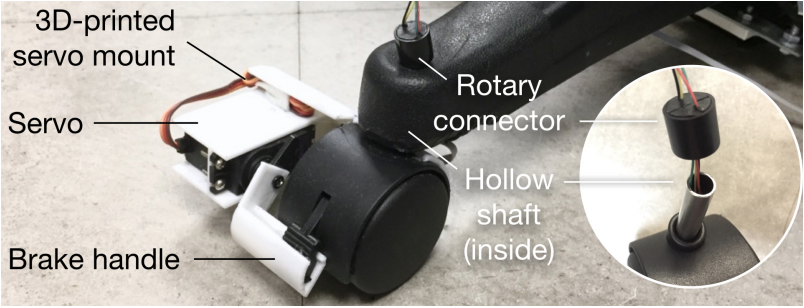
Rolling (caster)
We created a braking system for the caster using servo motors (MG996R, TowerPro) to toggle the brake handle of wheels. The motor was mounted on the side of the wheel using a 3D printed case. To ensure that the wires do not get tangled due to the wheels spinning horizontally, we replaced the original solid shaft using a hollow one.
Application
On-demand Information Acquisition
Smartphone notifications are event driven and can be inadequate in social situations where there is a desire for a user to query information (e.g., finding how much time is left until the next meeting). The existing research allowed the user to query information by squeezing a smartphone or rotating a smart ring. Aarnio provides an alternative for a user to query information by rotating, tilting, or rolling the chair. Aarnio provides an alternative for a user to query information by rotating, tilting, or rolling the chair. In our implementation, the amount of resistive force for rotation indicates the time remaining until one’s next meeting. For example, no force indicates plenty of time, a strong resistive force indicates 15 minutes to the meeting, and the seat becoming unmovable indicates that one is late to the meeting.
Hands-free Interactions
Interacting with a smartphone often requires two hands. However, this can be challenging in situations where a user’s hands are occupied by a task. For example, many fitness apps require a user to enter calorie information about a meal. A user may feel reluctant about doing while eating as their phone may get dirt.
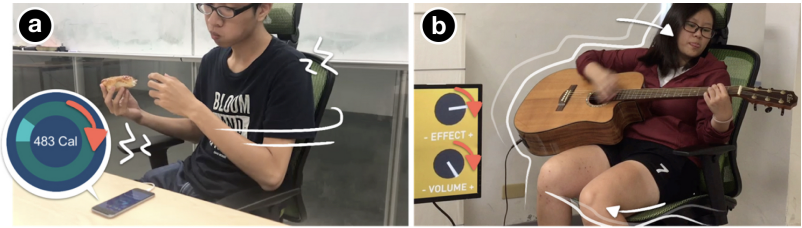
Aarnio allows a user to (a) enter calorie information; (b) adjust a guitar rig without interrupting the tasks at hand.
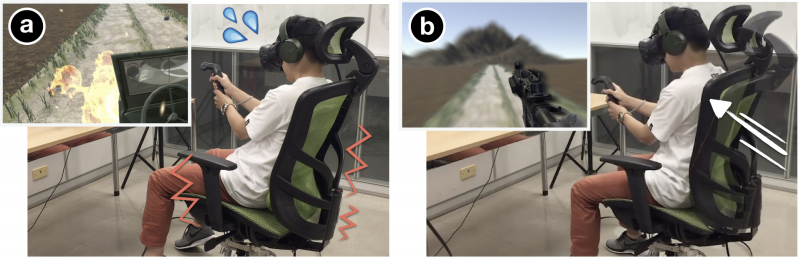
Gamming
Haptic feedback from the chair makes the gaming experience even more immersive. With our implementation of a VR first-person action game, the player steers a jeep by rotating the seat. If the front wheels are damaged, the seat is made hard to rotate or completely locked in place to restrict the mobility of the vehicle (a). Additionally, increasing the spring tension of the backrest pushes the user’s back to simulate the feeling of the player being pushed into the seat during car acceleration (b).